
激光雷达测量技术是目前测绘领域的新生和具有革命性的测量手段,在传统测绘领域及数字城市、文物保护等工程应用领域具有巨大的发展前景和潜力。通过本课程的学习,学生应能掌握激光雷达测量的基本工作原理和数据采集流程,点云数据处理的基本理论和方法。另外,在了解激光雷达测量技术的目前工程应用和发展趋势的基础之上,掌握目前常用点云数据处理软件操作,并锻炼学生的扫描方案设计、实际动手操作及点云处理基本算法编程能力。
谢洪
《数字测图原理》及《遥感原理与应用》

介绍激光雷达技术的历史、现状与发展趋势;激光雷达的基本工作原理、一般系统组成及其性能指标;激光雷达测量定位原理、激光雷达数据采集的工作流程、测量误差分析及系统检校;点云数据信息特征、配准与影像信息融合;点云数据的组织、滤波、空洞修补、压缩及特征提取等预处理方法;点云数据的分割与分类;点云数据的三维模型重建;激光雷达测量技术的应用;常用点云数据处理软件操作。
通过各教学环节,本课程应达到下列要求:(1)熟悉激光雷达测量的发展和特点、工作原理和流程。(2)掌握激光雷达几何定位原理及误差分析方法(3)重点掌握点云数据处理的基本理论和方法,主要包括点云数据的组织、配准、压缩及滤波等预处理方法,以及点云的点云分割、分类及模型重建等后处理方法。(4)了解并熟悉激光雷达测量技术目前的相关应用及相应的基本数据处理流程。(5)学会使用目前点云数据处理软件的基本处理操作。(6)能够掌握一般扫描场景的扫描布设方案设计方法。
课堂多媒体授课;点云数据采集野外实习;点云数据处理软件上机实习。
内容:了解三维激光雷达技术定义及国内外的研究现状;三维激光雷达硬件分类和常用扫描设备;三维激光雷达技术特点;三维激光雷达的发展趋势。
重点讲授:三维激光雷达技术的定义;三维激光雷达硬件的工作技术特点及与传统测绘技术的比较;三维激光雷达技术发展趋势。
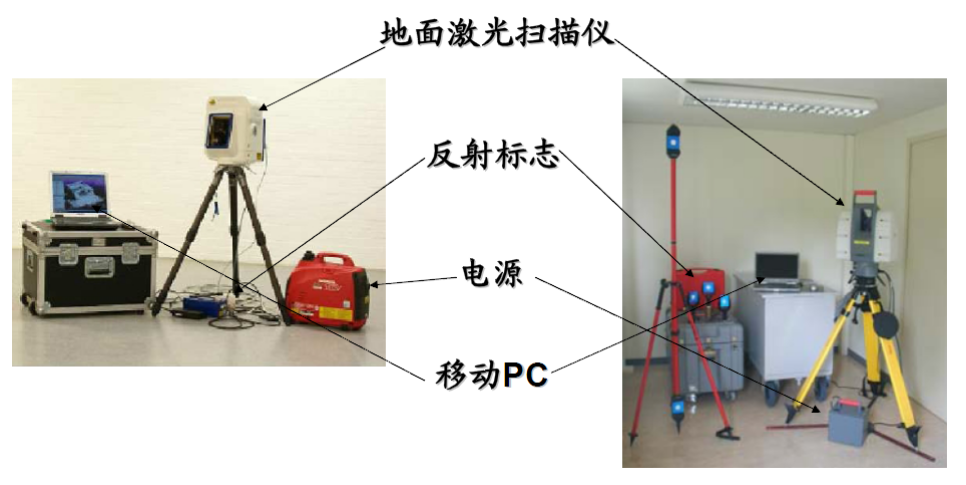
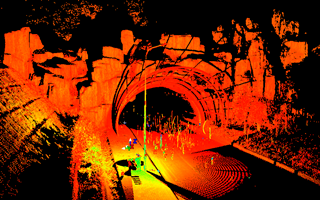
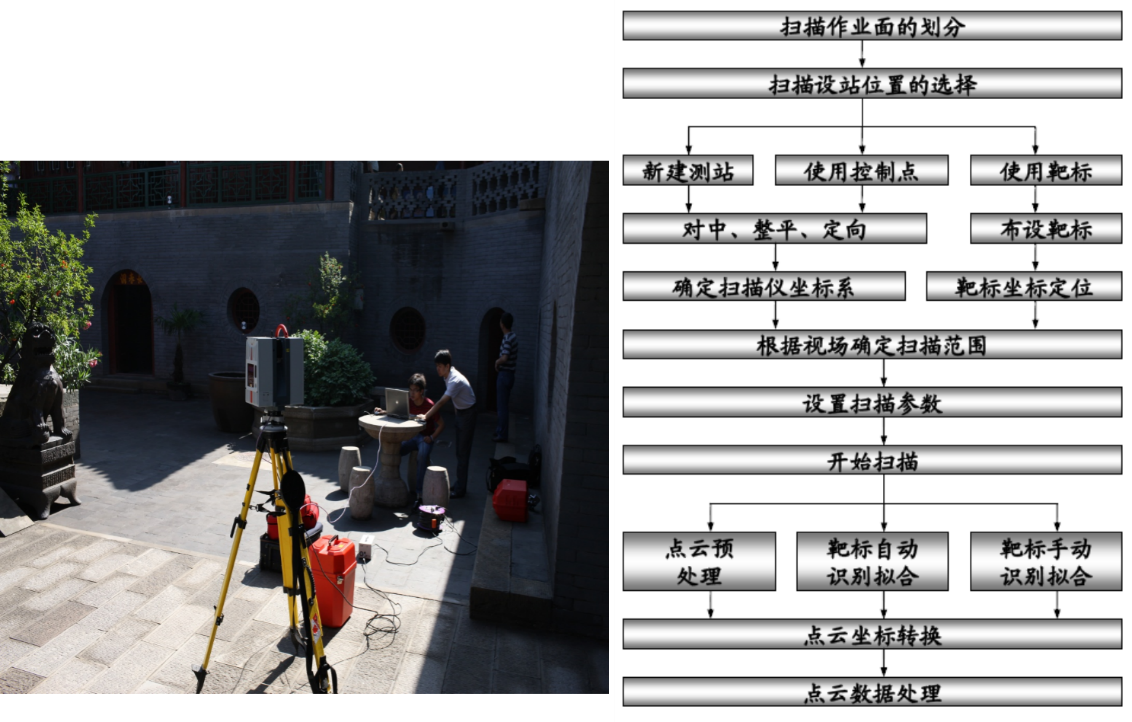
内容:地面三维激光雷达系统组成及工作原理;地面三维激光雷达分类及主要技术指标;地面三维激光雷达数据采集及处理一般流程
重点讲授:地面三维激光雷达系统组成及工作原理; 地面三维激光雷达数据处理一般流程
内容:点云定义与表达;点云坐标系及坐标转换;点云信息特征及数据存储交换;点云信息特征;主要点云数据处理软件系统
重点讲授:点云定义与表达;点云坐标系及坐标转换;

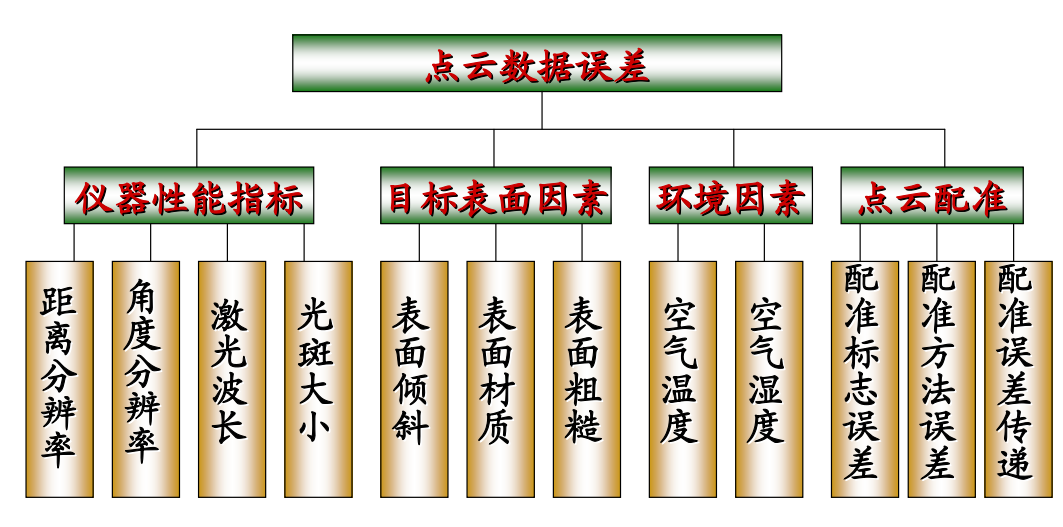
内容:地面三维激光雷达误差分析;点云噪声来源及特性;点云质量评价一般方法;三维激光雷达检校
重点讲授: 点云误差模型、测距误差及测角误差;点云随机噪声以及孤立点噪声;检校场的建立、三维激光雷达自检校模型及检校方法
内容:点云配准与融合;点云与光学影像配准及融合;
重点讲授: 点云配准模型、配准靶标的提取、ICP配准算法;单片影像与点云的配准、序列影像与点云的配准以及点云与影像信息融合

内容:点云数据组织;点云空洞修复;点云数据简化与压缩
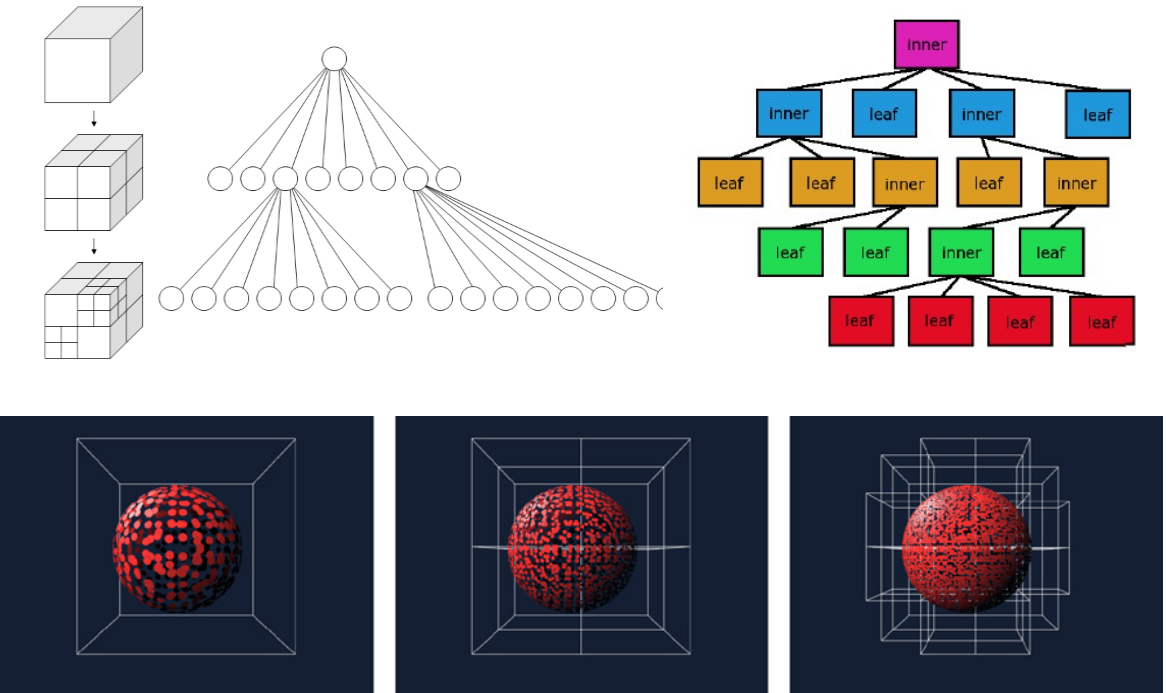
重点讲授: 点云八叉树、KD树以及格网三种点云组织方法及基于索引的点云邻域查询方法;点云空洞探测以及局部曲面拟合空洞修复;基于曲率及法向量信息的点云压缩
内容:点云数据组织;点云空洞修复;点云数据简化与压缩
重点讲授: 点云八叉树、KD树以及格网三种点云组织方法及基于索引的点云邻域查询方法;点云空洞探测以及局部曲面拟合空洞修复;基于曲率及法向量信息的点云压缩;基于点云几何信息的高斯滤波以及双边滤波方法;基于点云强度信息的各向异性扩散滤波;基于点云曲率、特征值以及邻域的三种不同的特征提取方法
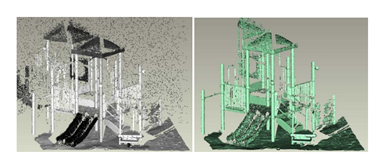
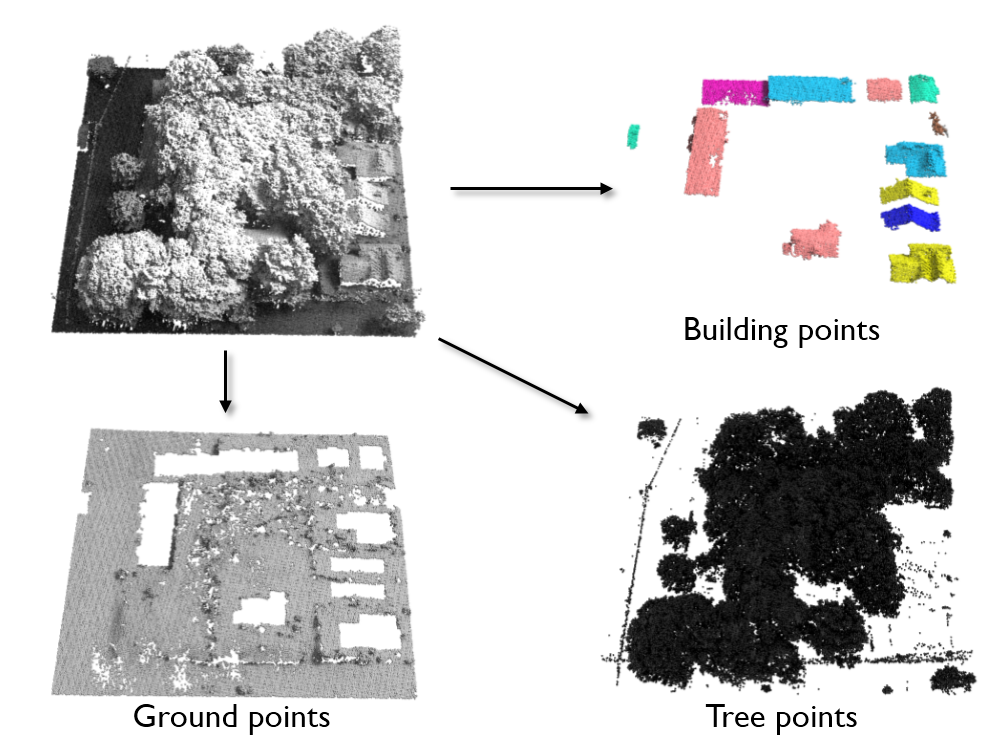
内容:点云分割定义及分割方法分类;常用点云分割方法;点云分类概述及点云分类方法;点云分类后处理与误差分析
重点讲授:点云分割方法分类;基于点云区域生长、聚类以及模型拟合等三类常用的点云平面分割方法的流程及优劣势比较分析;常用的监督以及非监督分类方法;点云分类误差混淆矩阵及各类分类误差评定指标
内容:规则几何体的提取与拟合;NURBS曲面拟合;点云格网模型重建;纹理纠正与模型纹理映射
重点讲授:在点云分割分类基础上进行点云的平面、球面、柱面等模型的重建;NURBS曲面模型以及基于点云的NURBS模型重建方法与流程;常用的点云的Delaunay、BPA以及Possion等常用三角网重建算法
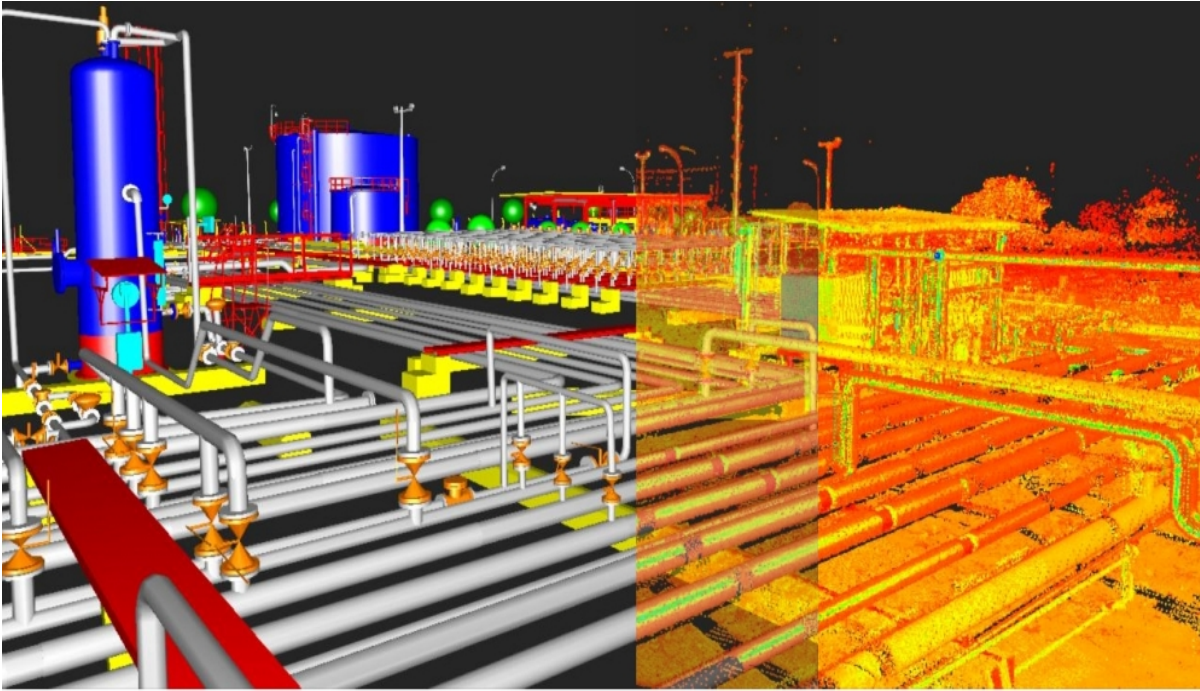
内容:三维激光雷达技术应用
重点讲授:三维激光雷达技术在工程测量、办公室测绘、变形监测以及数字城市等领域的应用及数据处理一般流程。
