
摄影测量学是对非接触传感器系统获得的影像及其数字表达进行记录、量测和解译,从而获得自然物体和环境的可靠信息的一门工艺、科学和技术信息科学。通过本课程的学习,使学生了解并掌握摄影测量学的理论与方法,并能够理论与实际相联系,解决实际生产中的问题。
邓非,朱惠萍
数字测图、大地测量学,误差理论与测量平差基础、数字图像处理。
熟悉摄影测量的内涵,掌握摄影测量的基础知识、解析摄影测量原理与方法、摄影测量测图方法、全数字摄影测量原理及数字地面模型的概念、像片纠正的概念、摄影测量外业的有关知识,重点掌握中心投影构像方程、坐标系统、像点位移、像片的内外方位元素等基本知识、双像解析摄影测量及区域网解析空中三角测量的原理与方法、数字微分纠正、数字地面模型等。
多媒体讲授、系统演示、程序设计相结合。
内容:了解摄影测量学的任务、特点、优势、分类和发展。
重点讲授:摄影测量学的特点、发展。
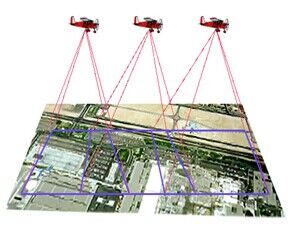
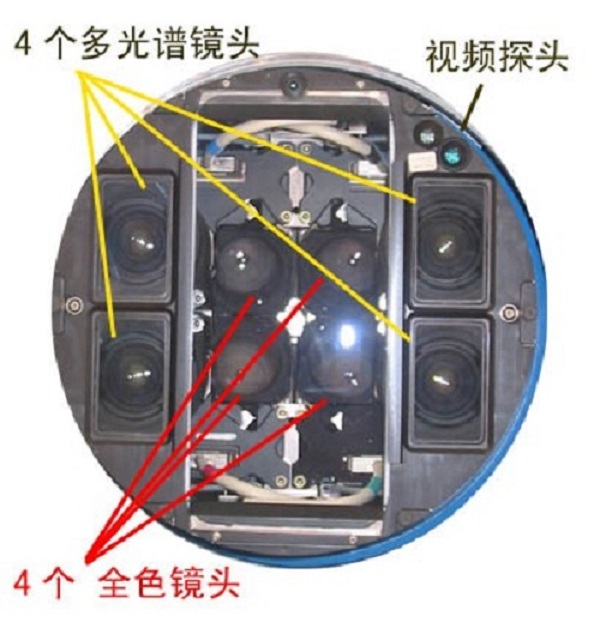
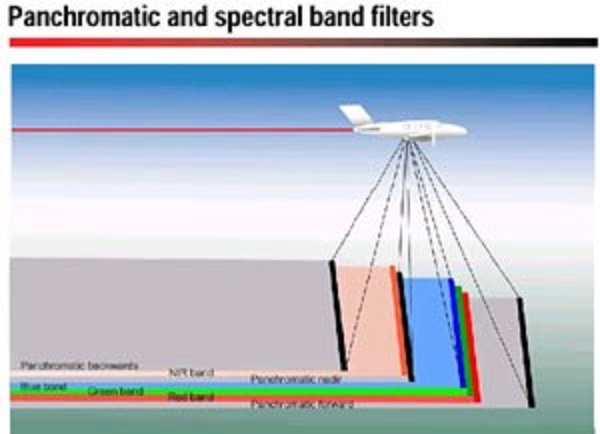
内容:航空和遥感影像获取;认识影像:主光轴、物镜中心、像片主距等基本概念。
重点讲授:航空和遥感影像获取。

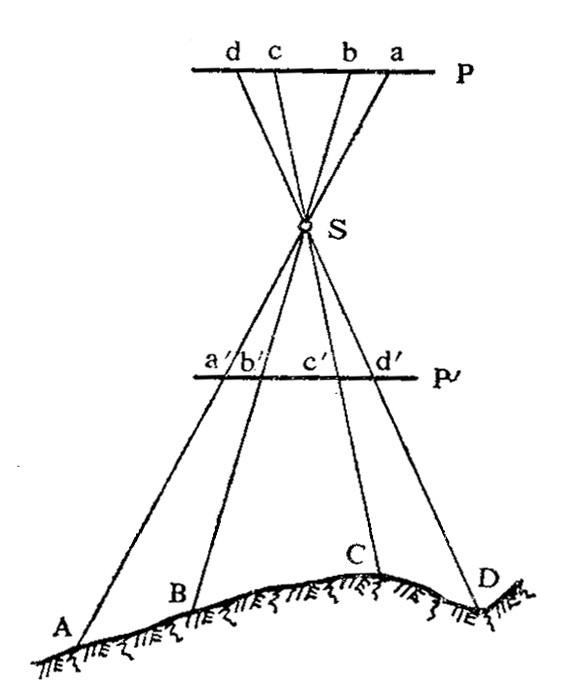
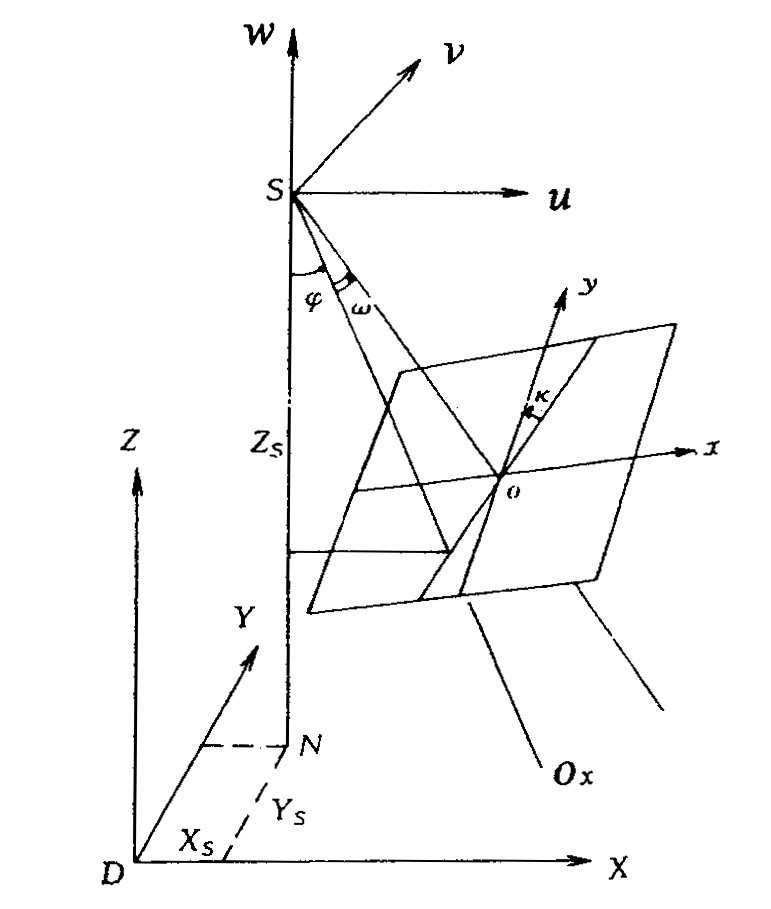
内容:空中摄影的基本要求;摄影比例尺、摄影航高、摄影基线、航向重叠度、旁向重叠度、像片倾角、航线弯曲、像片旋角等概念;中心投影的基本知识;摄影测量常用的坐标系统;航摄像片的内、外方位元素;像点的空间直角坐标变换;中心投影构像方程;航摄像片上的像点位移。
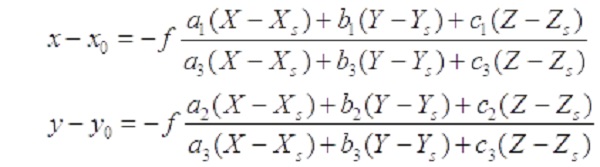
重点讲授:内、外方位元素含义及包含的内容;外方位角元素的理解;方向余弦;共线条件方程式的推导和理解。
共线条件方程式
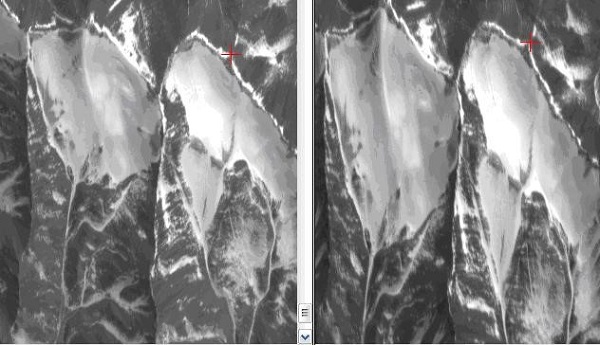
内容:立体视觉;立体观察与立体量测;立体像对与双像立体测图;核面;左右视差和上下视差。
重点讲授: 立体观察;双像立体测图。
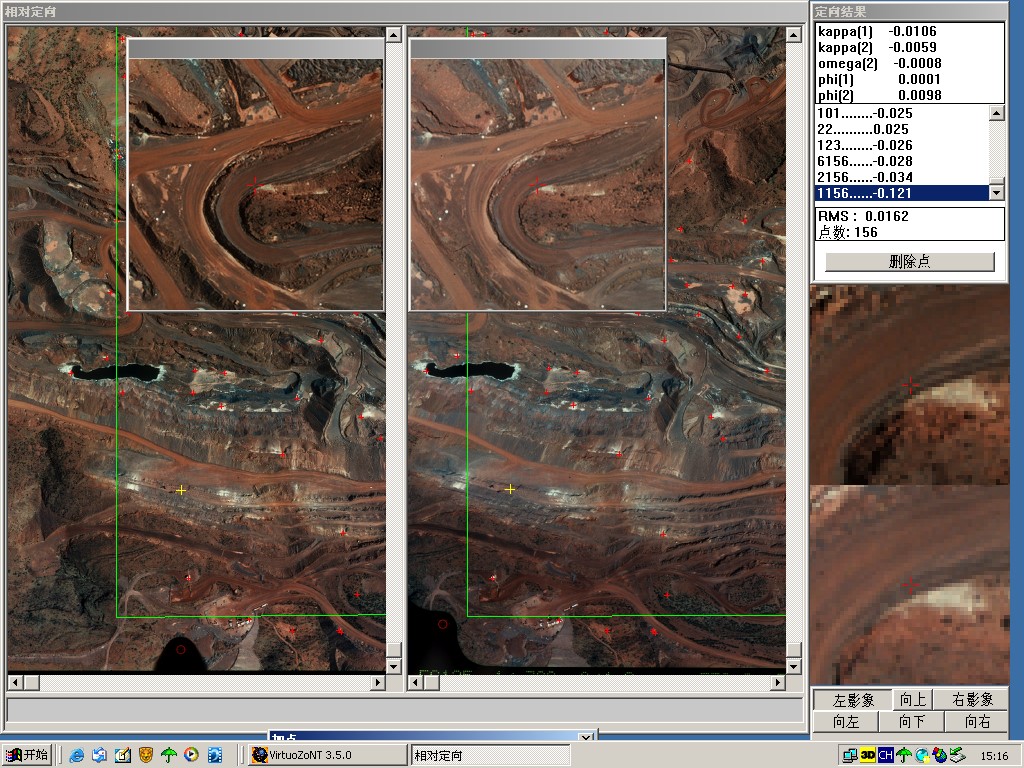
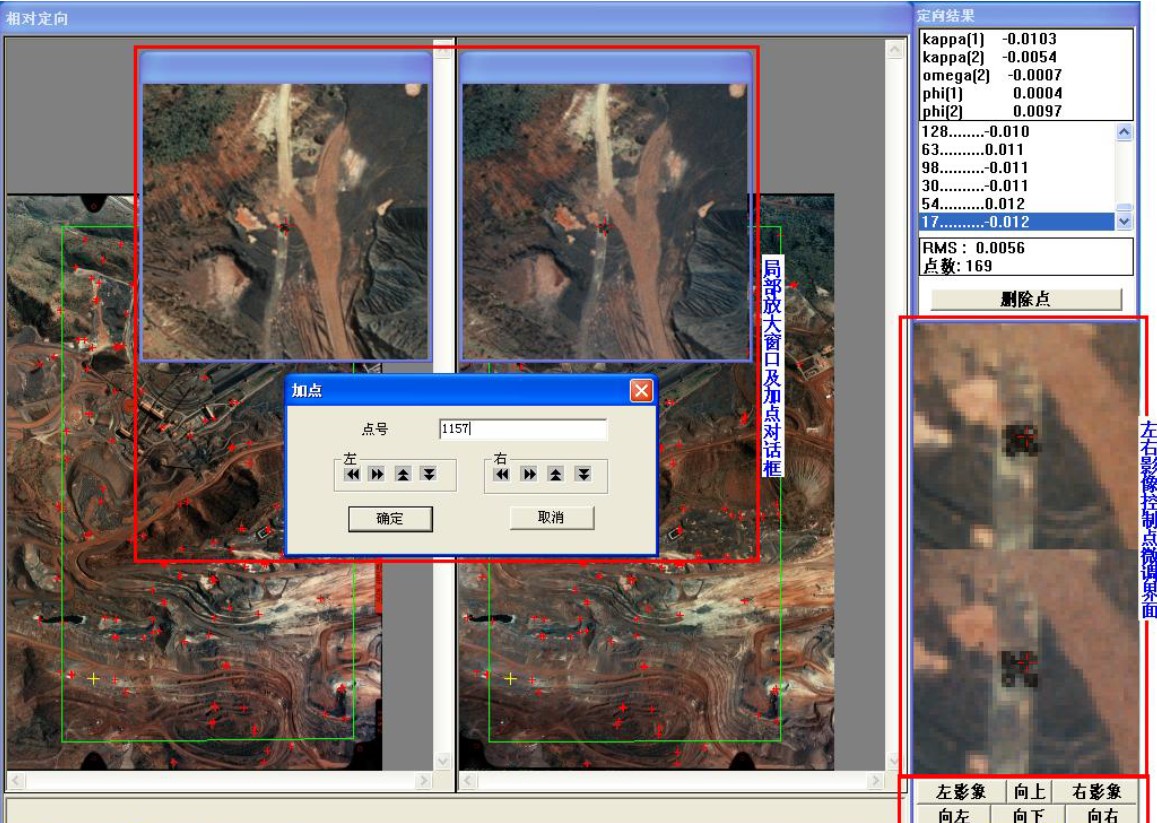
内容:单像空间后方交会原理、计算过程;立体像对的前方交会基本关系式、过程;立体像对的解析法相对定向;立体模型的解析法绝对定向;双像解析的光束法严密解;双像解析摄影测量三种解法的比较。
重点讲授:后方交会、前方交会、解析法相对定向、绝对定向的原理和过程。

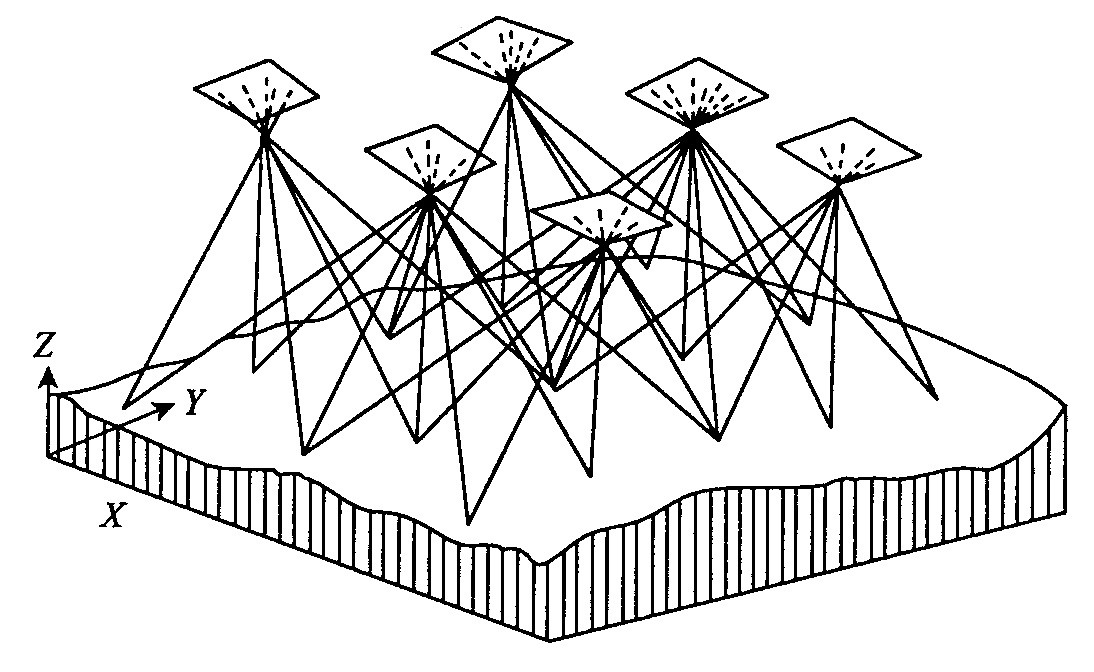
内容:解析空中三角测量的概念及分类;像点坐标系统误差及其改正方法;航带法空中三角测量:构网过程、区域网平差;独立模型法区域网空中三角测量;光束法区域网空中三角测量:基本思想、基本关系式、平差过程、精度分析;三种区域网平差方法的比较。
重点讲授:航带网的模型连接及非线性变形改正;光束法空中三角测量基本思想、数学模型、平差过程。
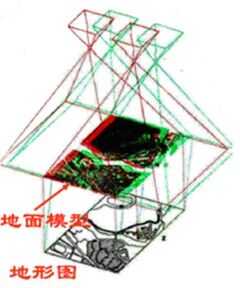
内容:数字高程模型的概念;DEM的两种主要形式:规则格网和不规则三角网。数字高程模型的内插方法;DEM的应用。
重点讲授:数字高程模型的内插方法;DEM的应用。

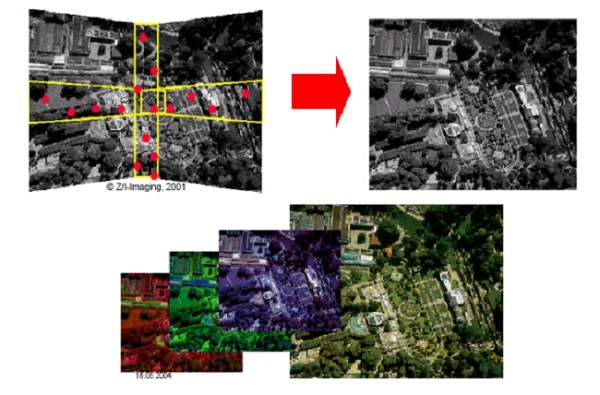
内容:数字影像内定向;数字影像重采样;基于灰度的数字影像相关方法;核线相关与同名核线的确定;数字摄影测量系统的主要功能与作业过程。
重点讲授:基于灰度的数字影像相关方法;最小二乘影像匹配;核线相关;数字摄影测量系统的主要功能和作业过程。

内容:像片平面图、正射影像图、像片纠正的概念;数字微分纠正的概念、基本原理与解算方案;反解法数字微分纠正的过程与特点;正解法数字微分纠正的过程与特点。
重点讲授:数字微分纠正;反接法数字微分纠正的过程。
内容:摄影测量外业工作任务及作业流程;控制点布点方案;像片解译与调绘。
重点讲授:控制点的布设;调绘内容与要求。